
University of Pennsylvania | Fall 2023 | Instructor: Andrew Saunders
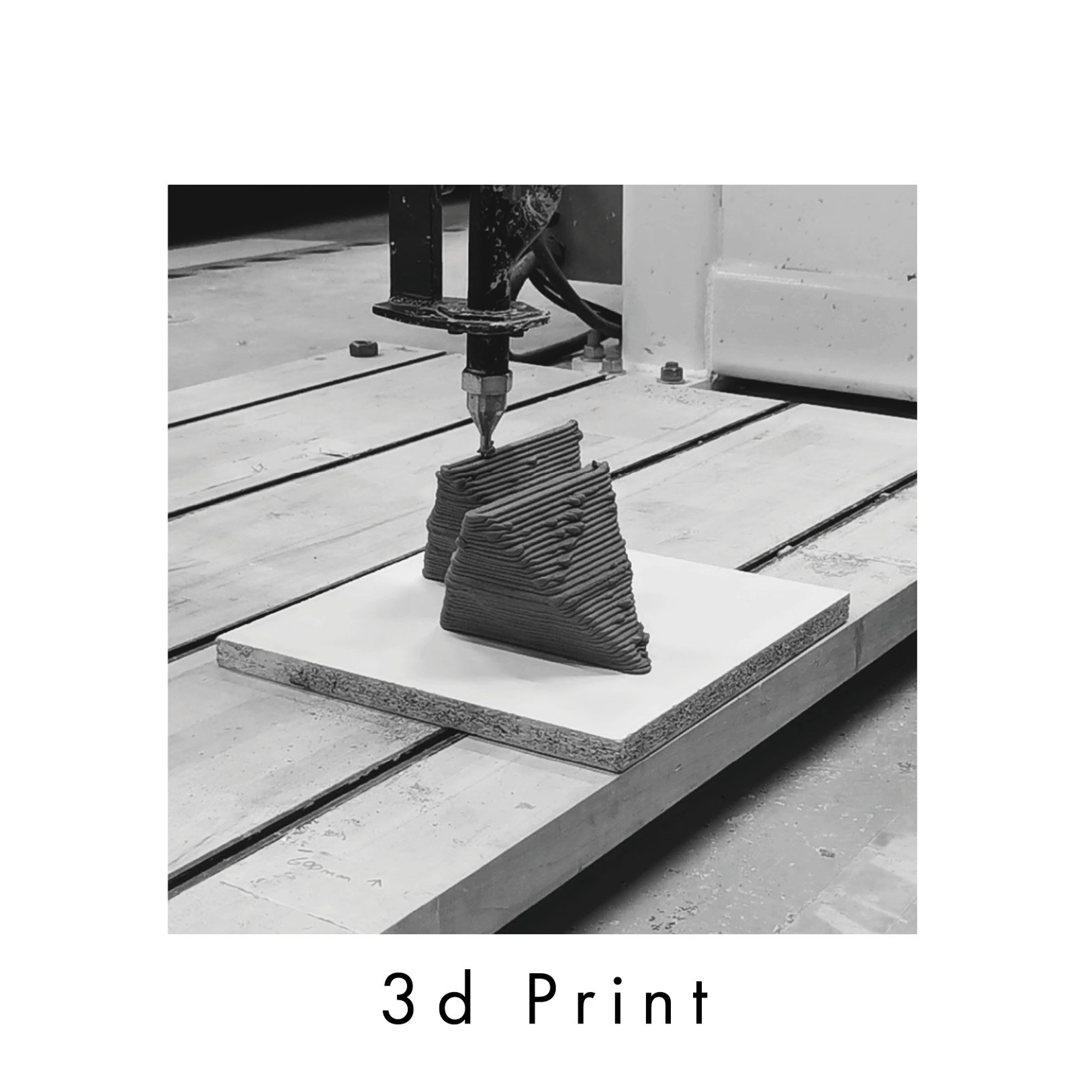
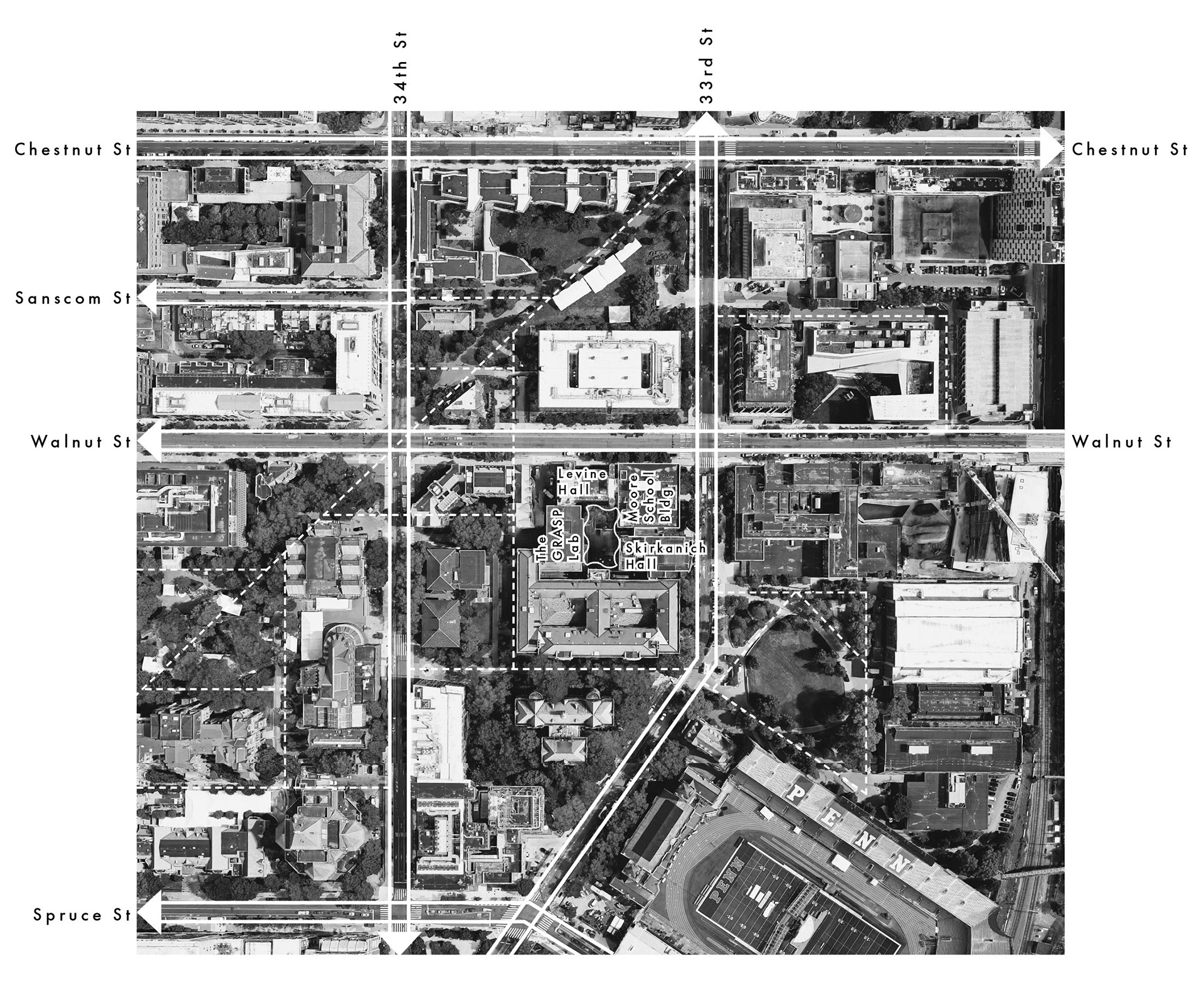
In this course, we learn to use an ABB IRB4600-60 industrial robot with a clay deposition tool in the Robotic Lab. The focus is on mastering clay deposition, firing, glazing, and assembly techniques. Through this, students will quickly create tangible works while understanding the importance of design within manufacturing constraints, particularly in polyhedral and ceramic processes. The course culminates in a project to redesign a courtyard garden near Skirkanich Hall on the UPenn campus, applying these space-filling geometrical and assembly concepts.

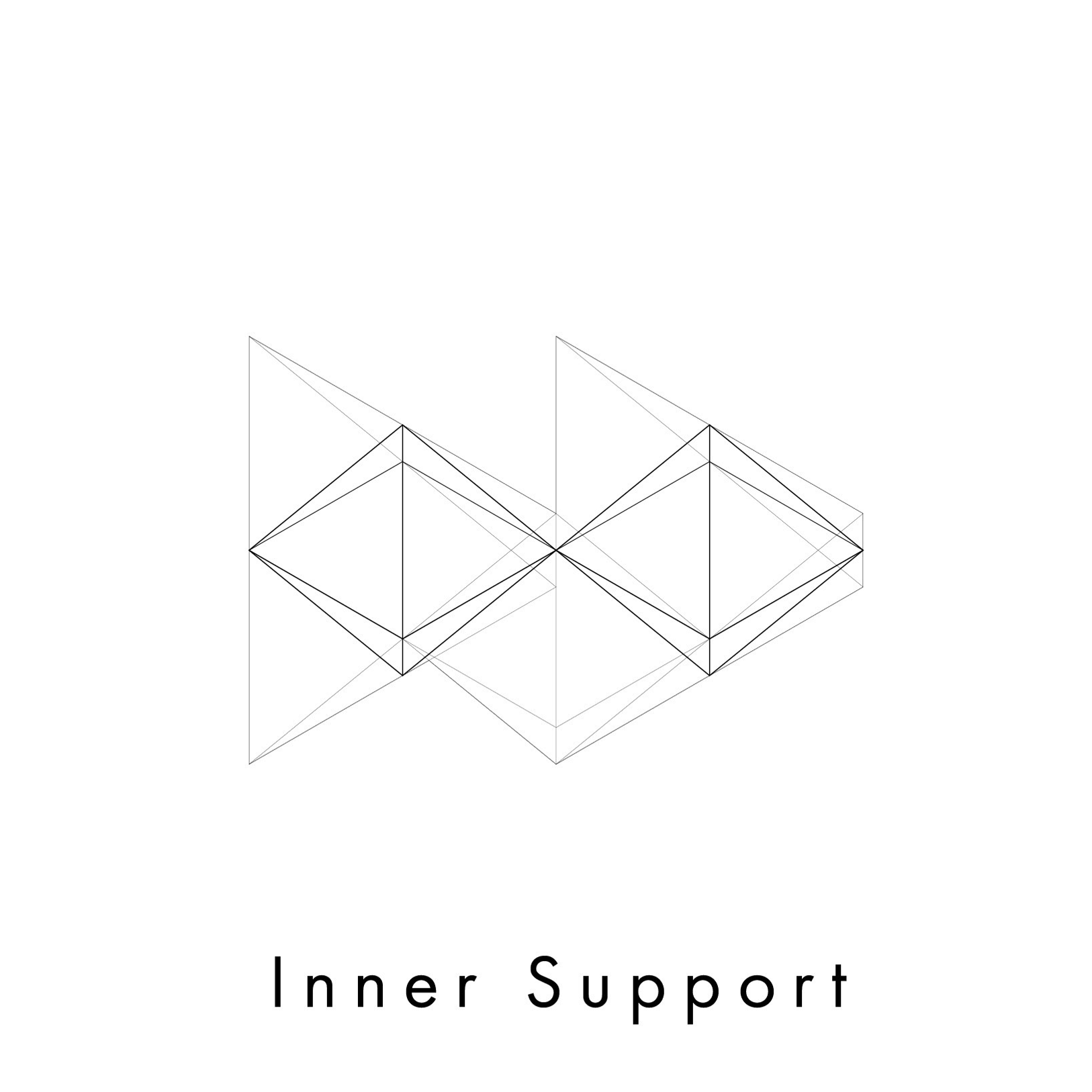
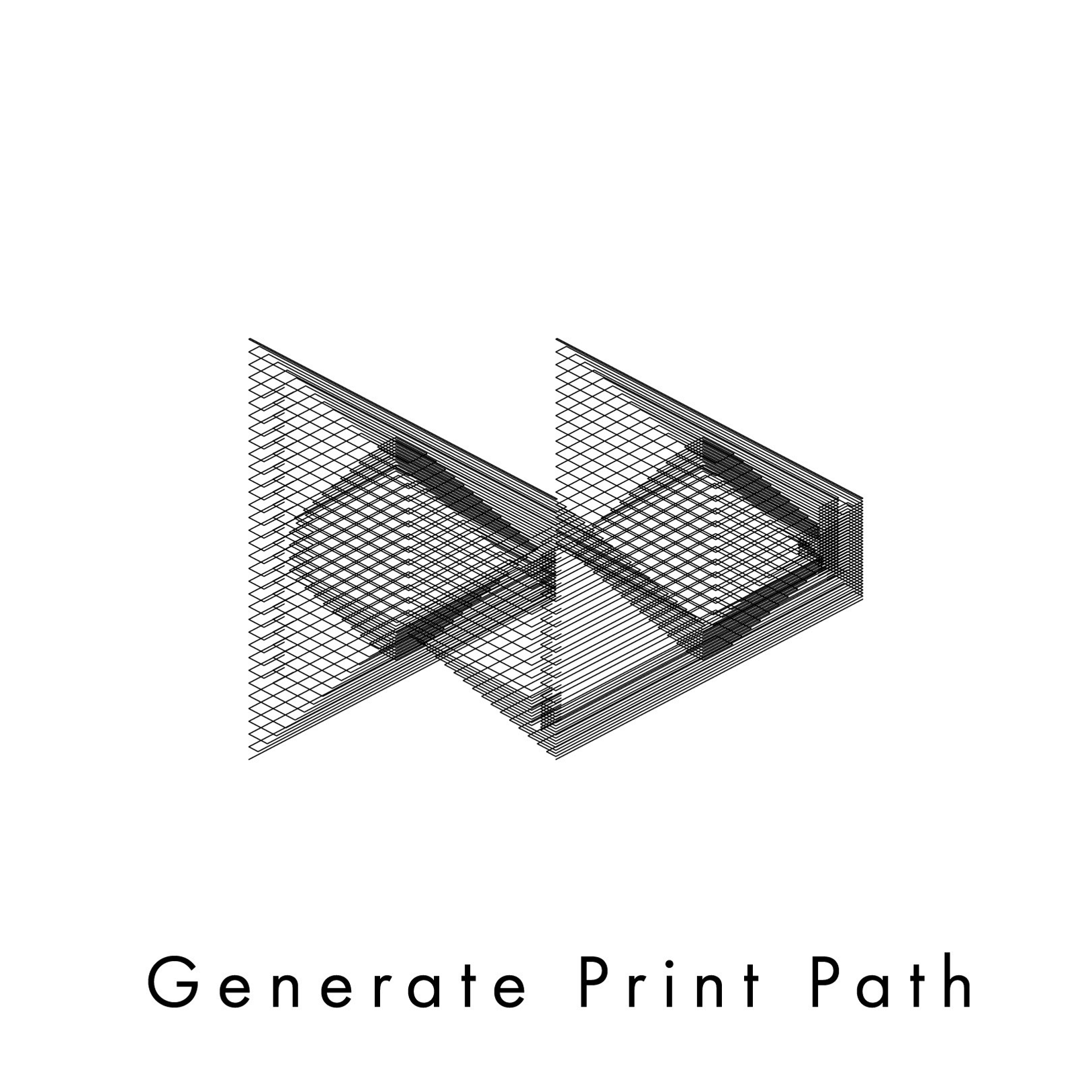
Everyone in our studio will receive a starting prototype and print it out in clay. We will need to digitally model and deconstruct it. Since we can't print out the full model directly without print support in clay print, we need to find a way to deconstruct and assemble it.

Fabrication Process
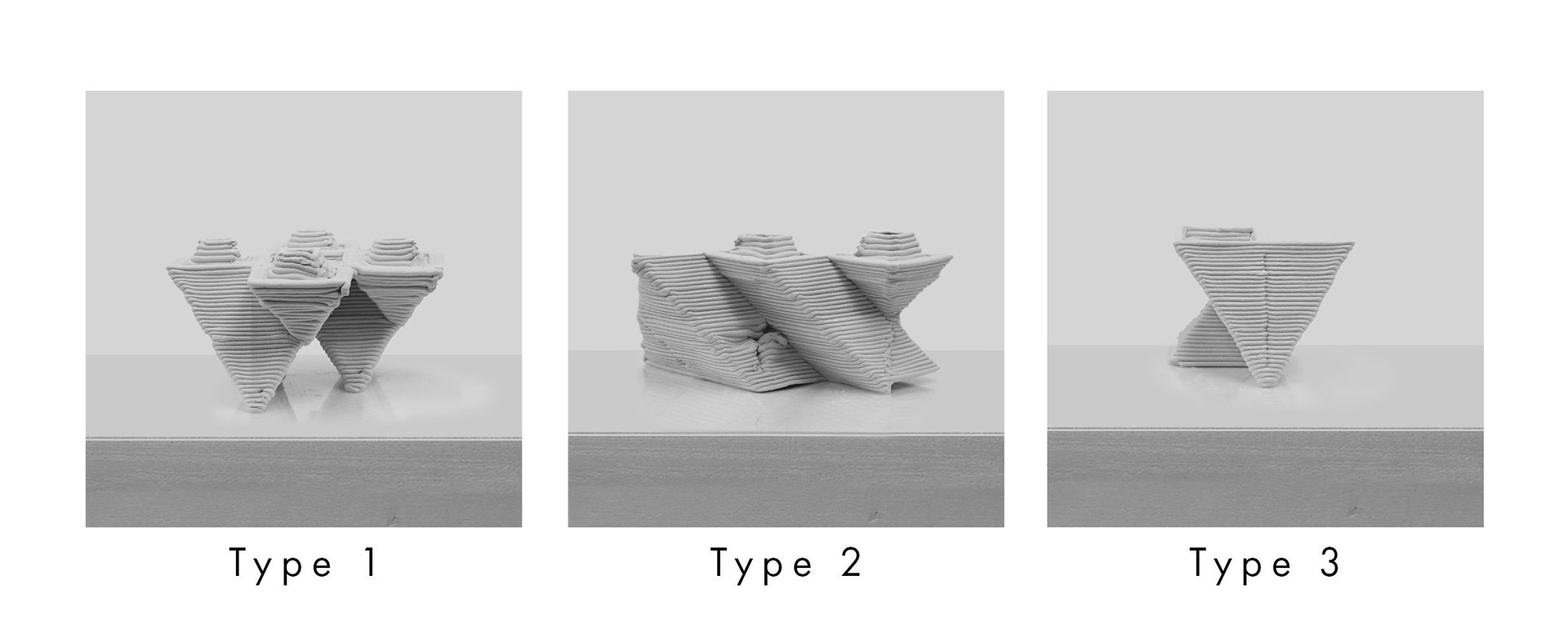
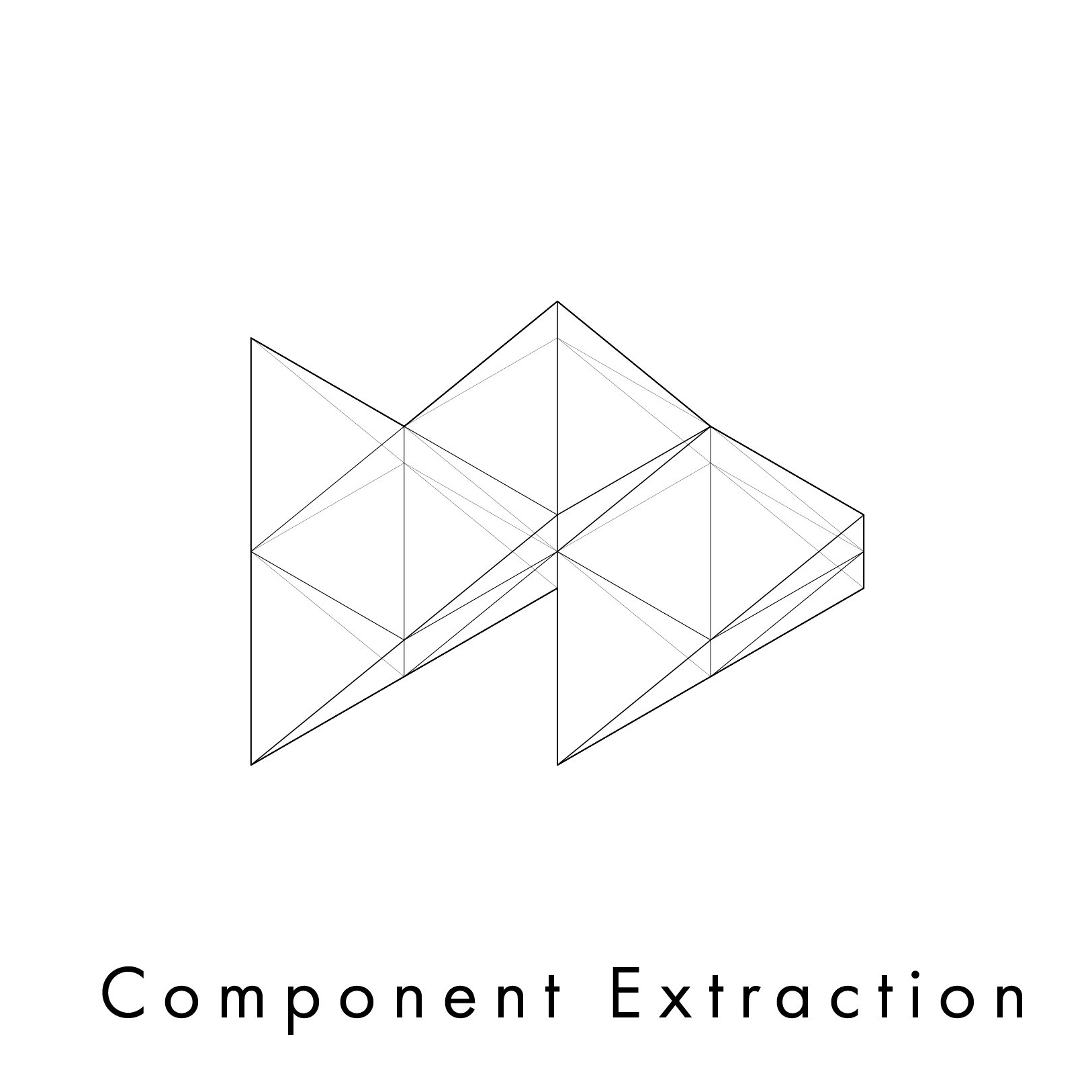
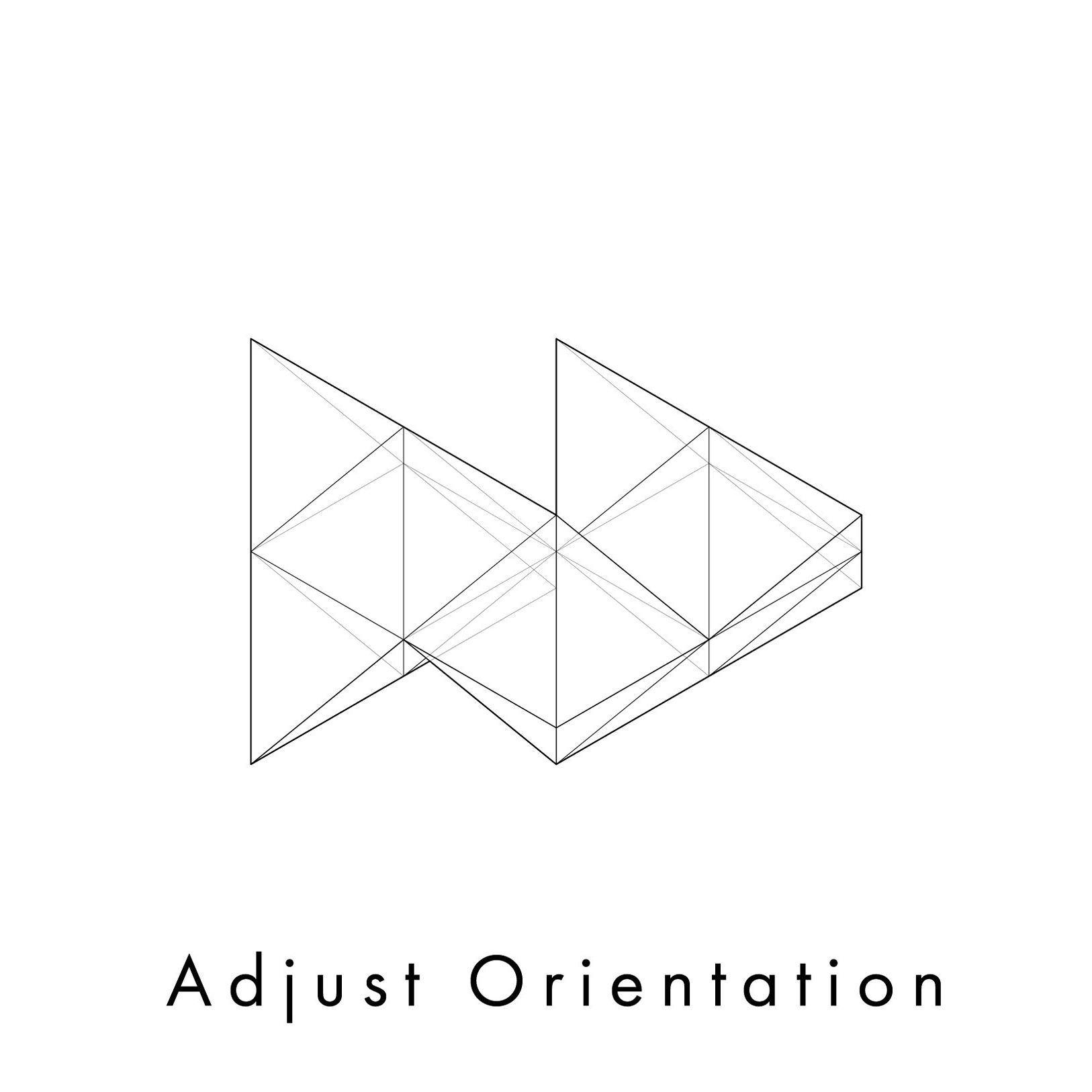
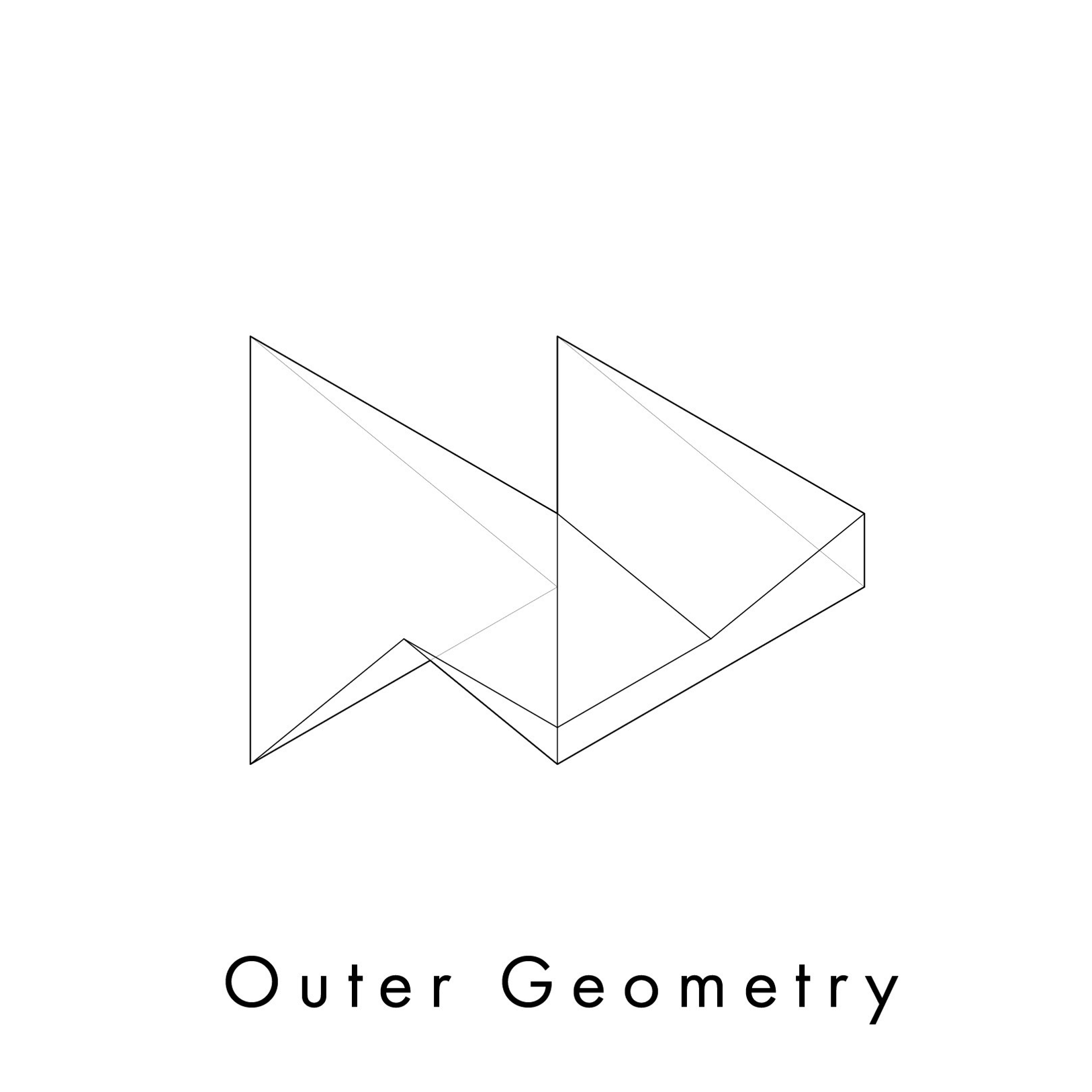
Components
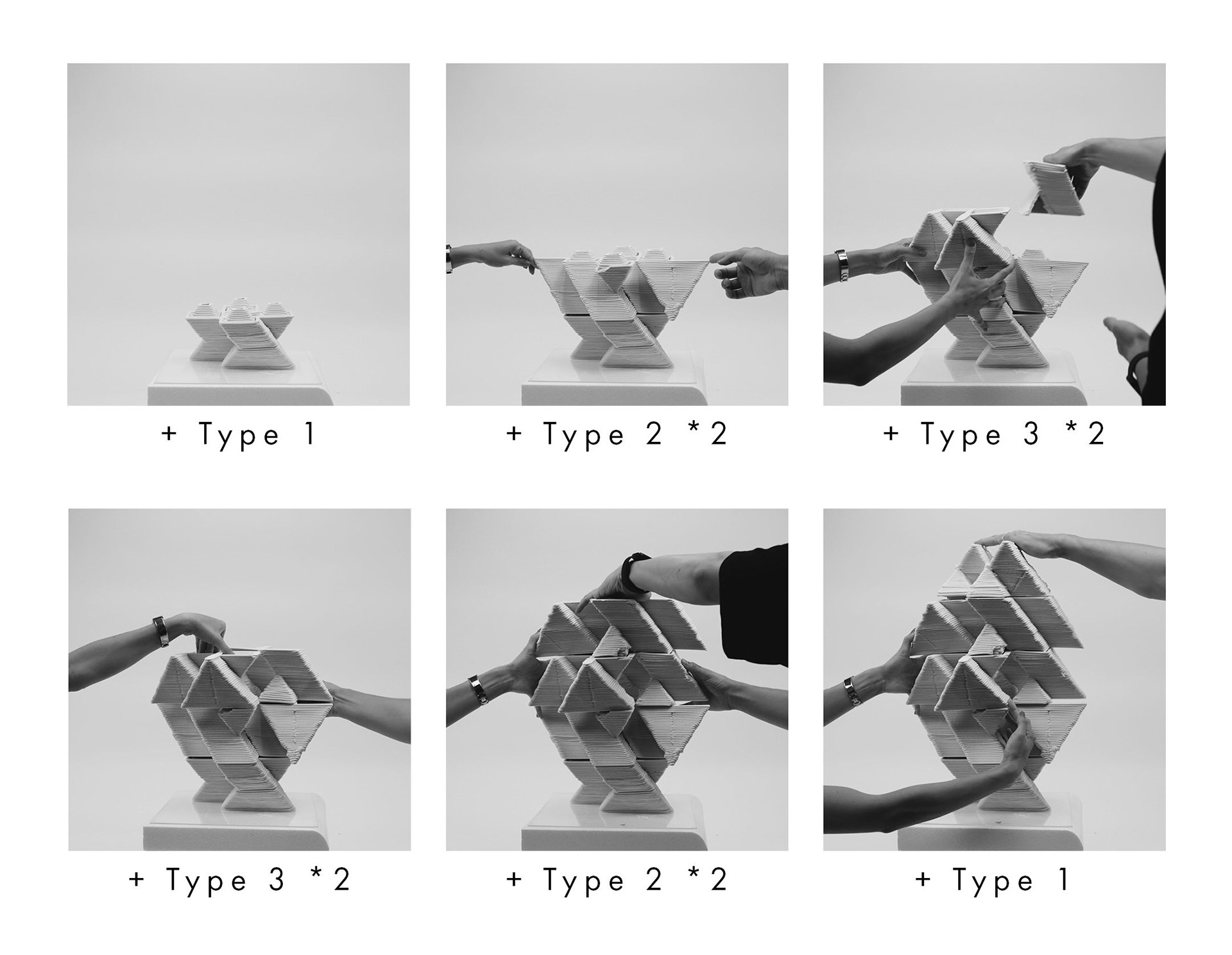
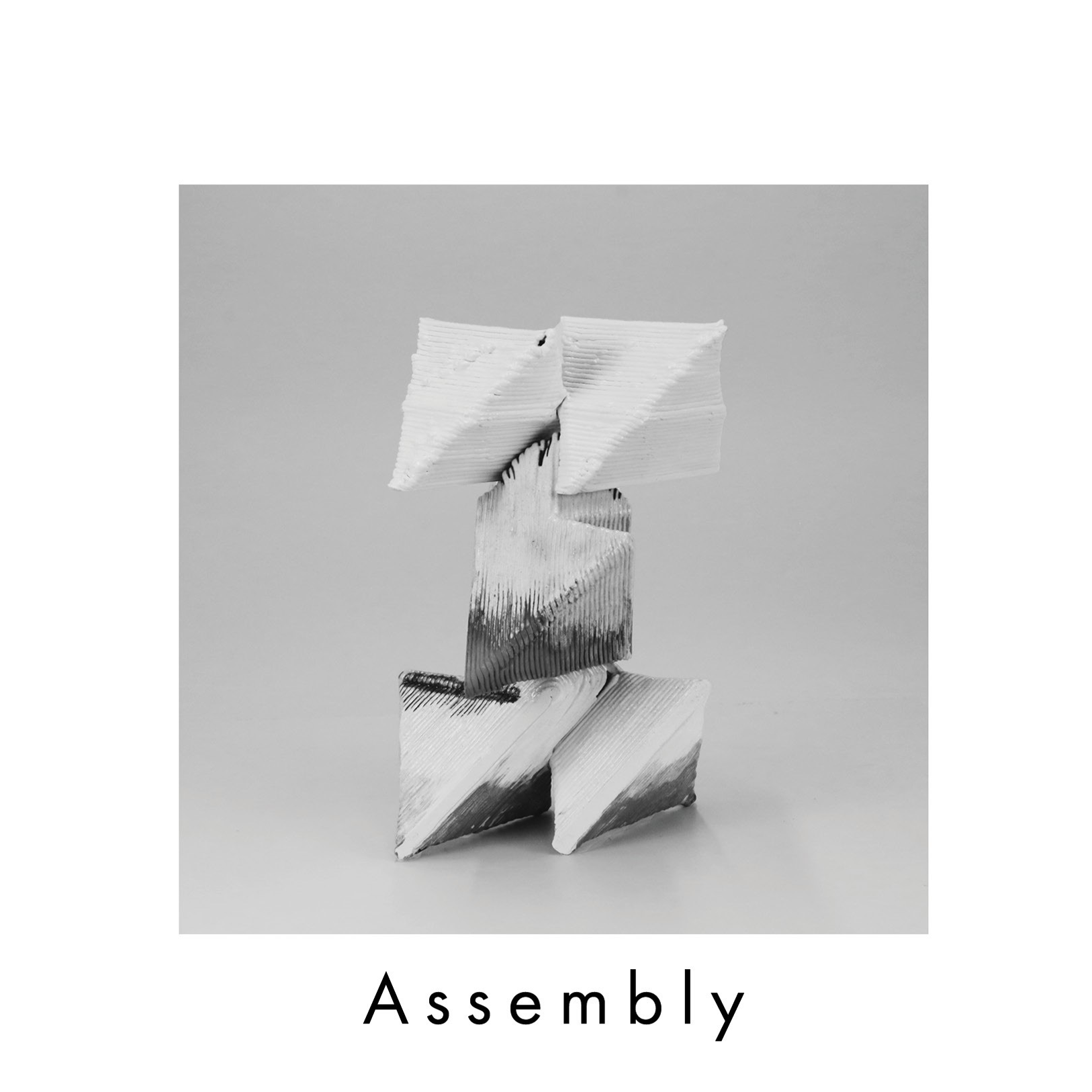
Assemble Components
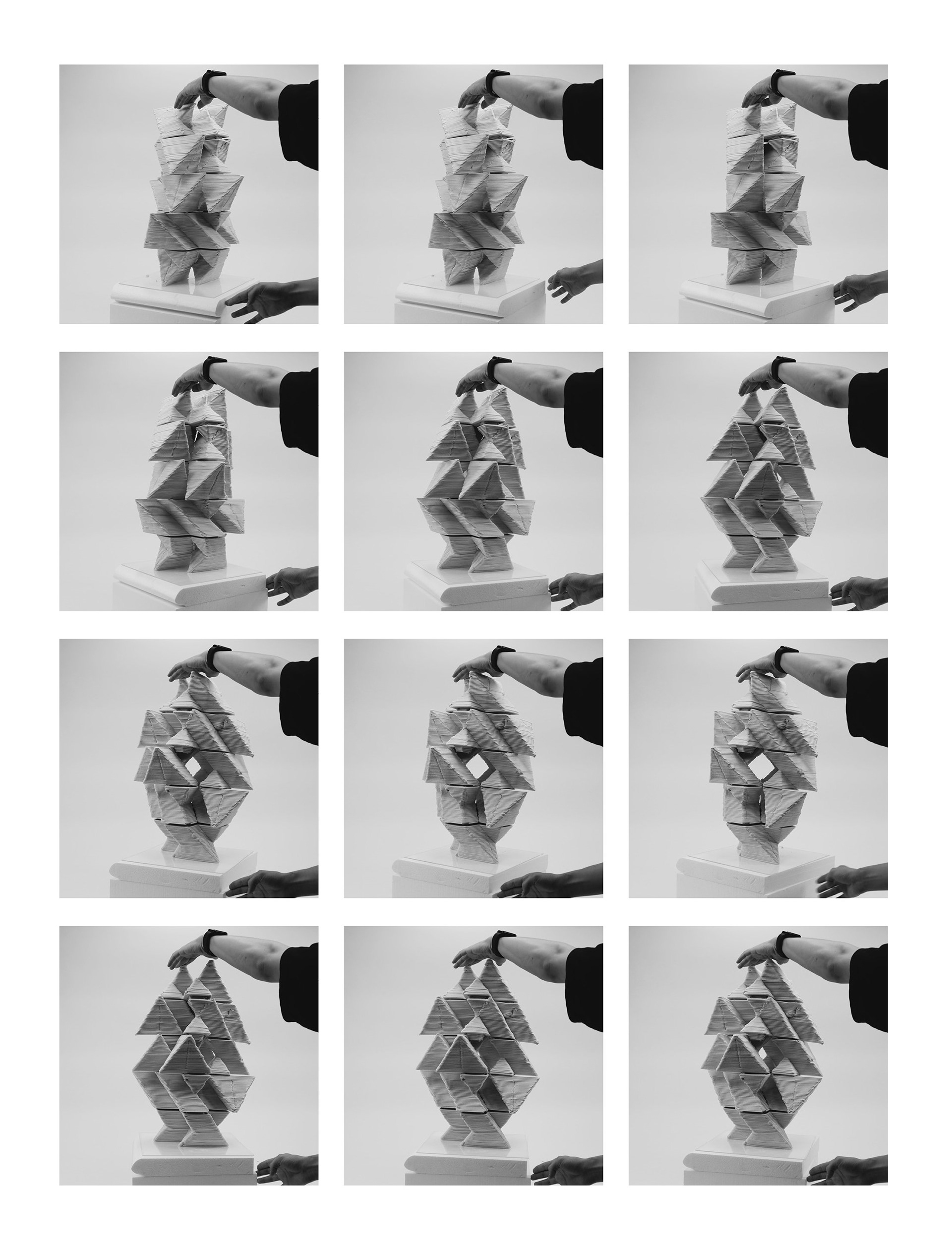
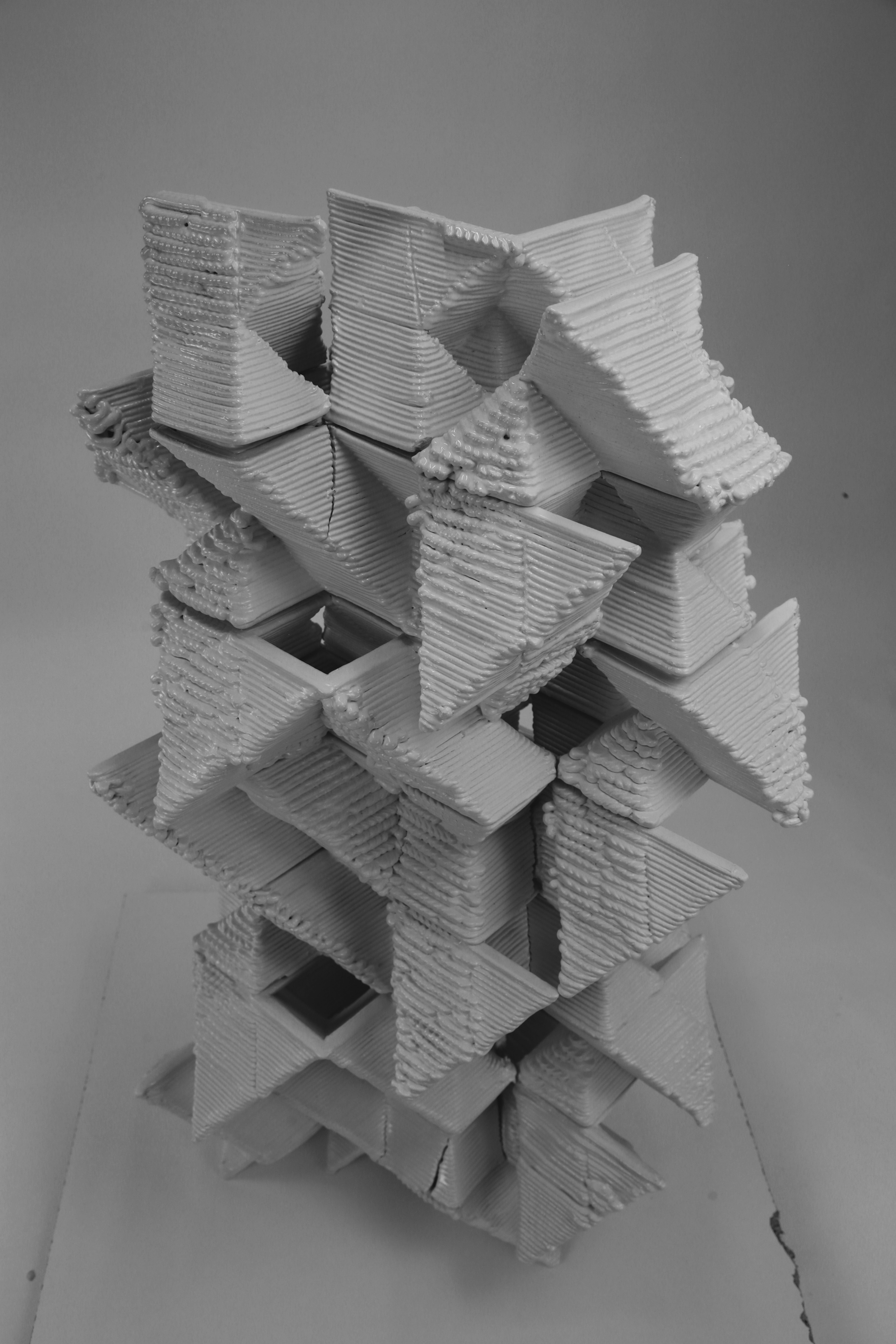
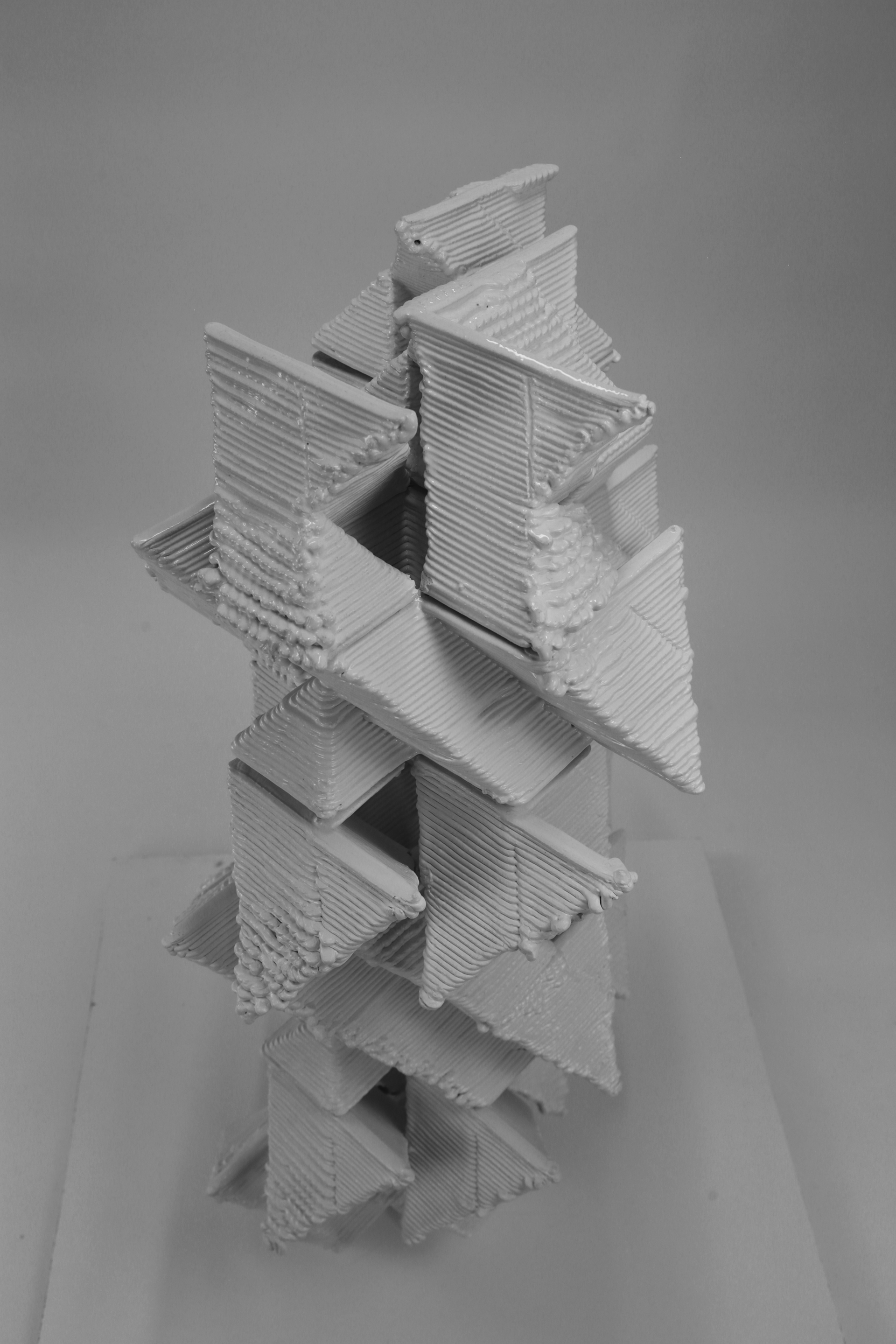
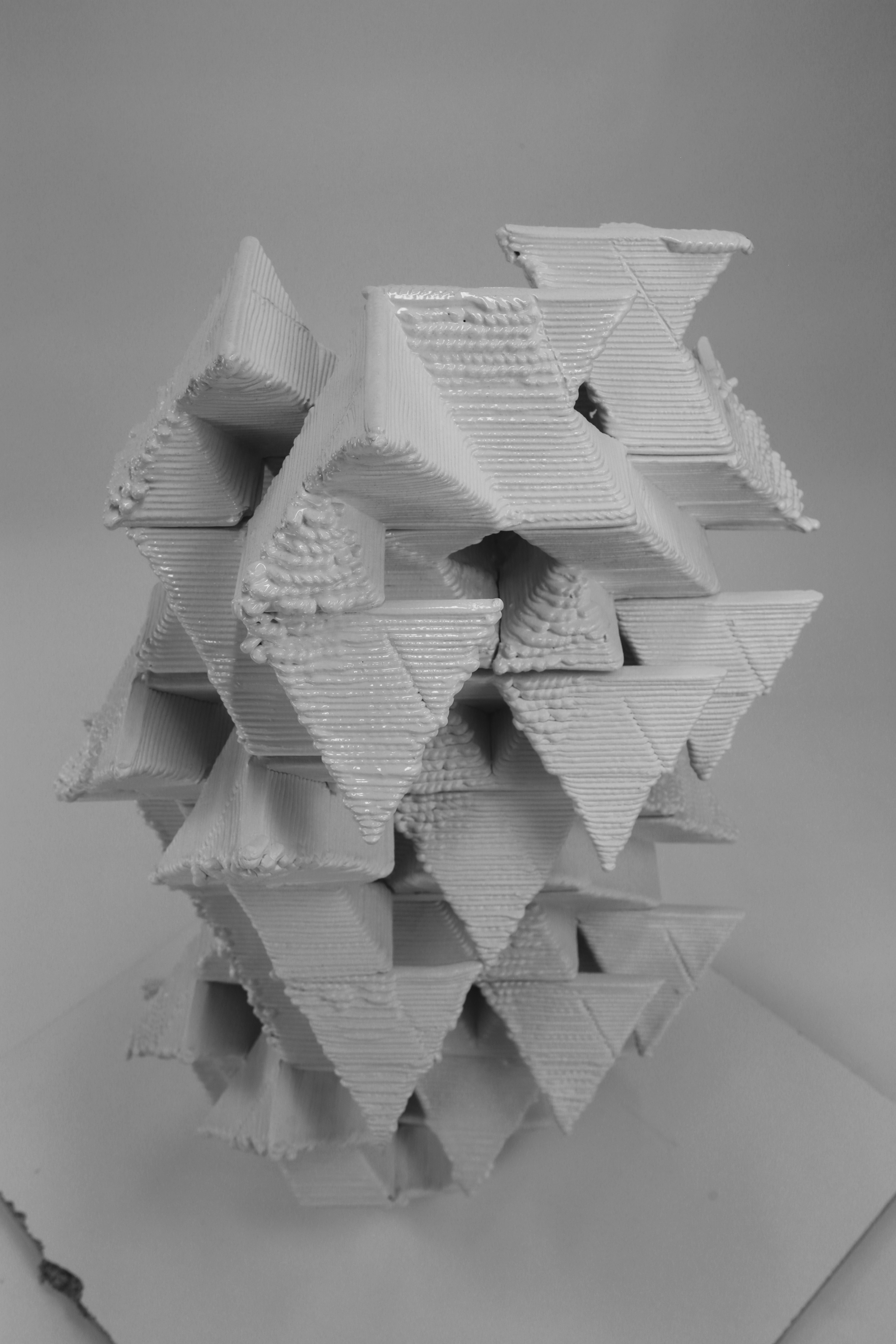
Turn Table Views

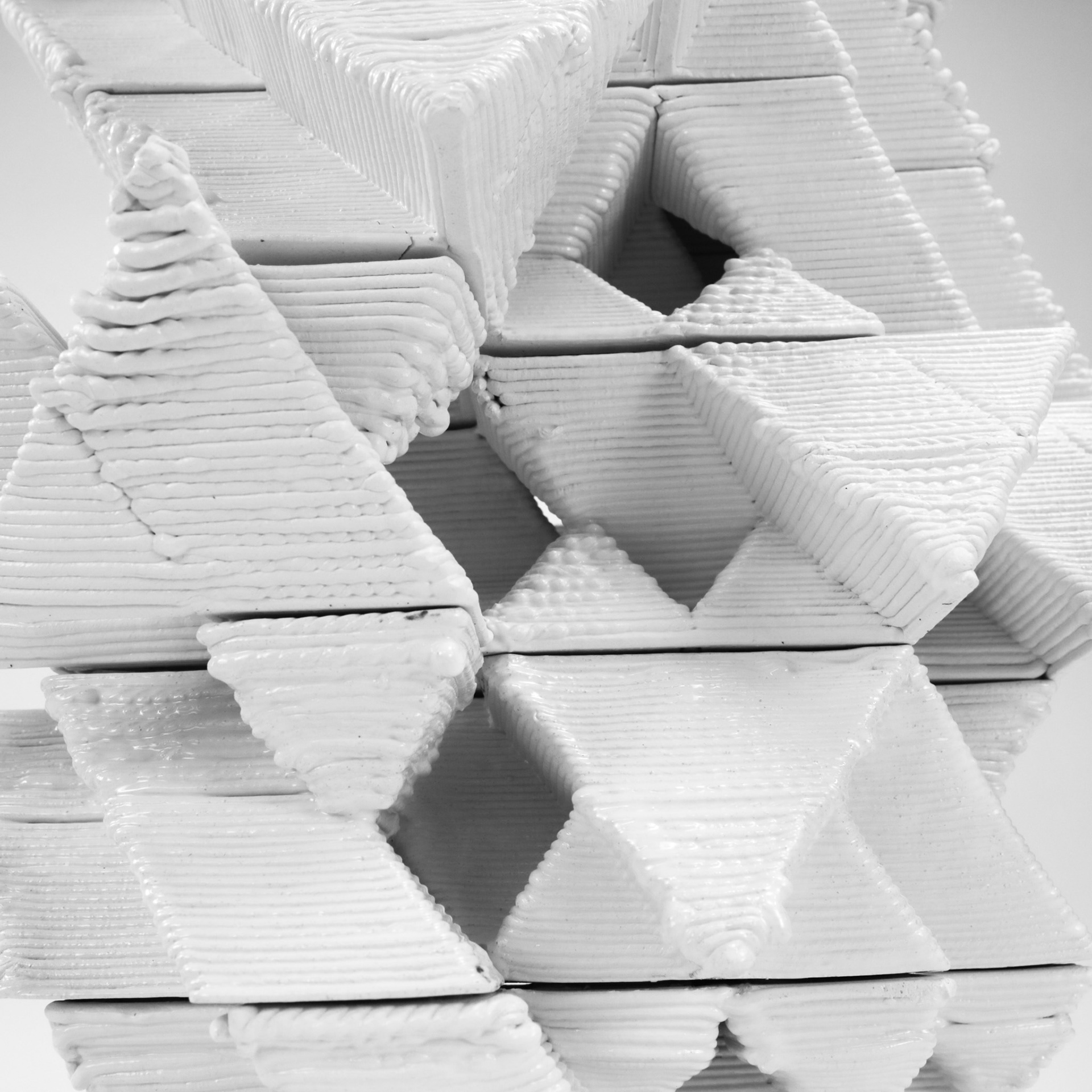
Prototype 1 to Design Geometry
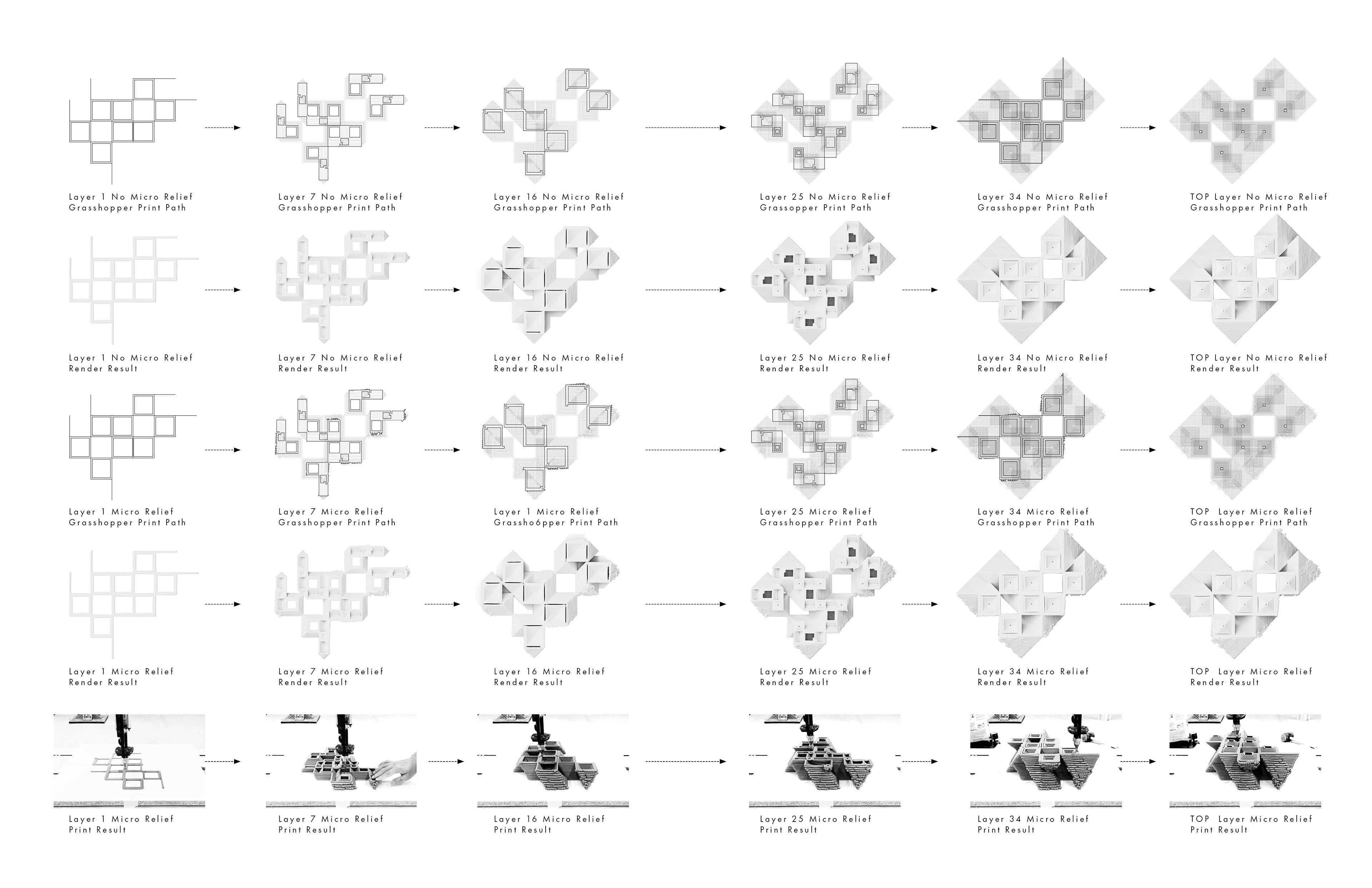
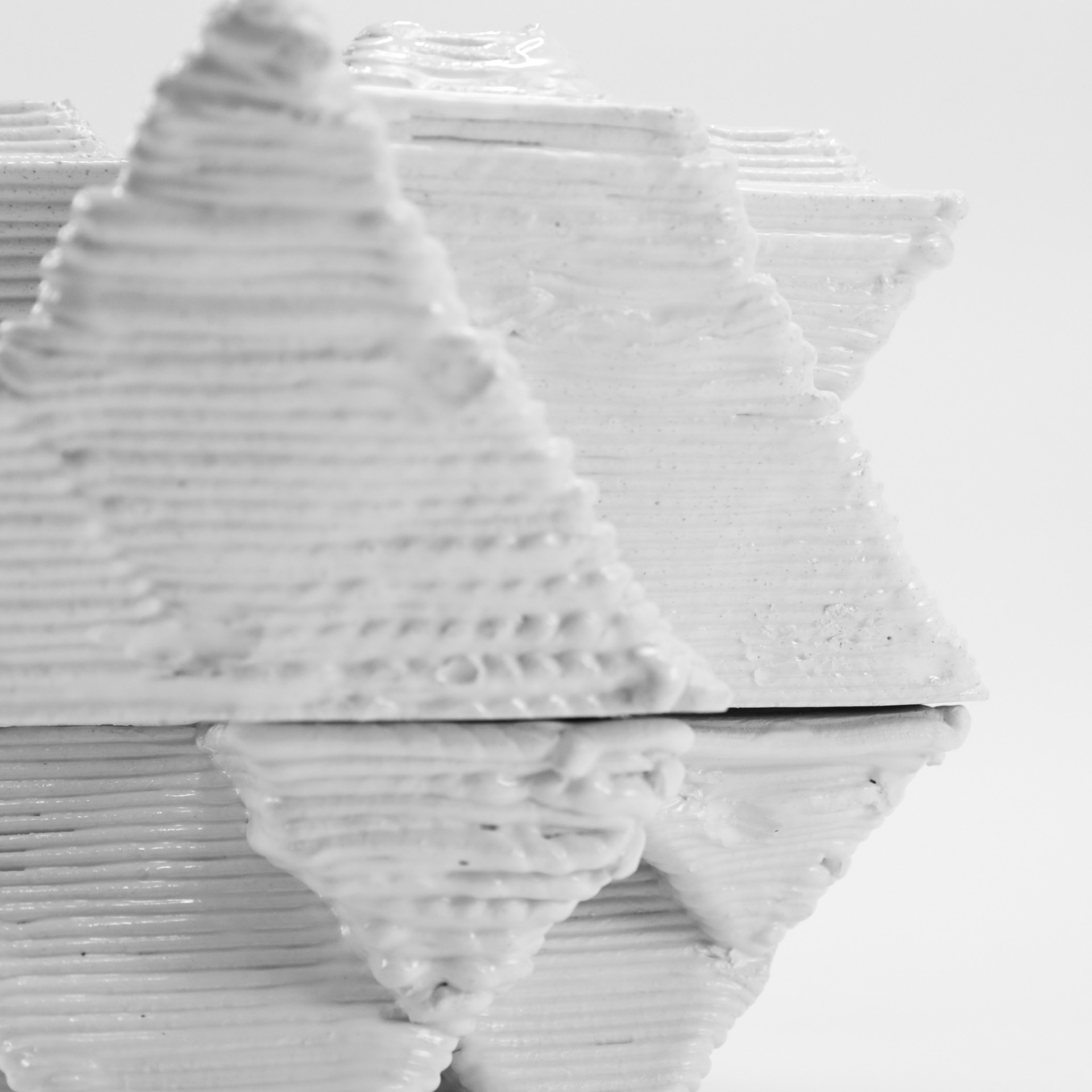
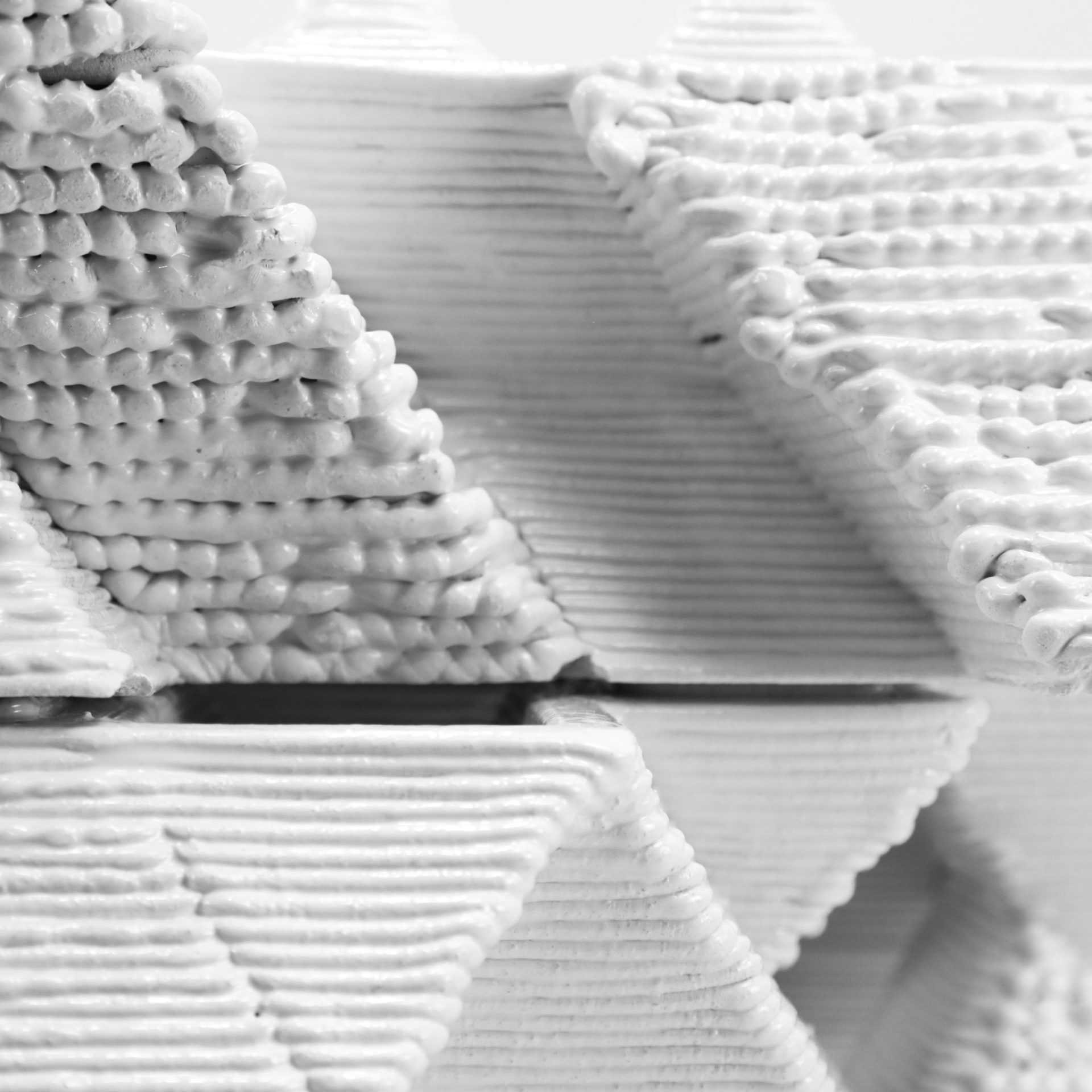
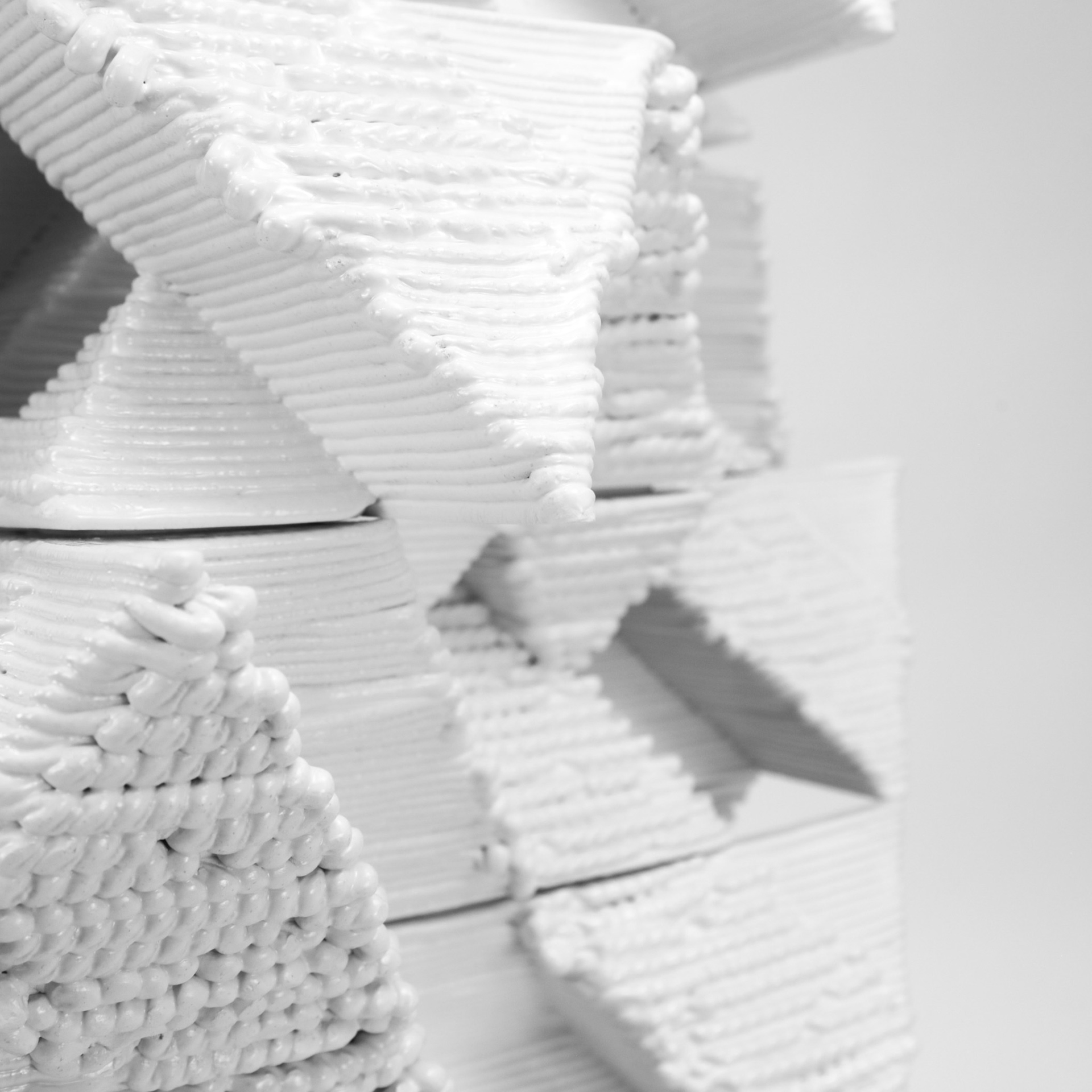
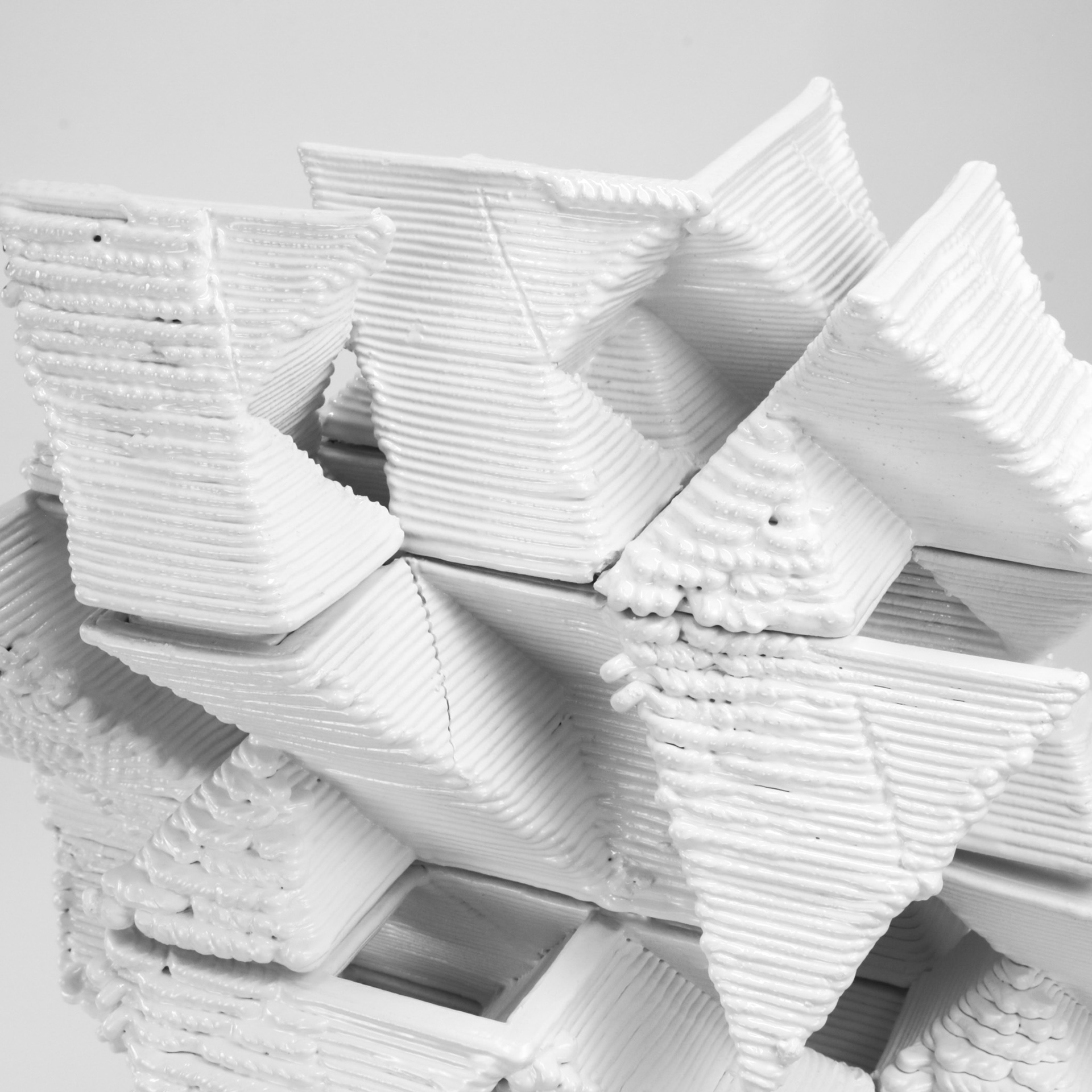
Module Print w/ Micro Relief
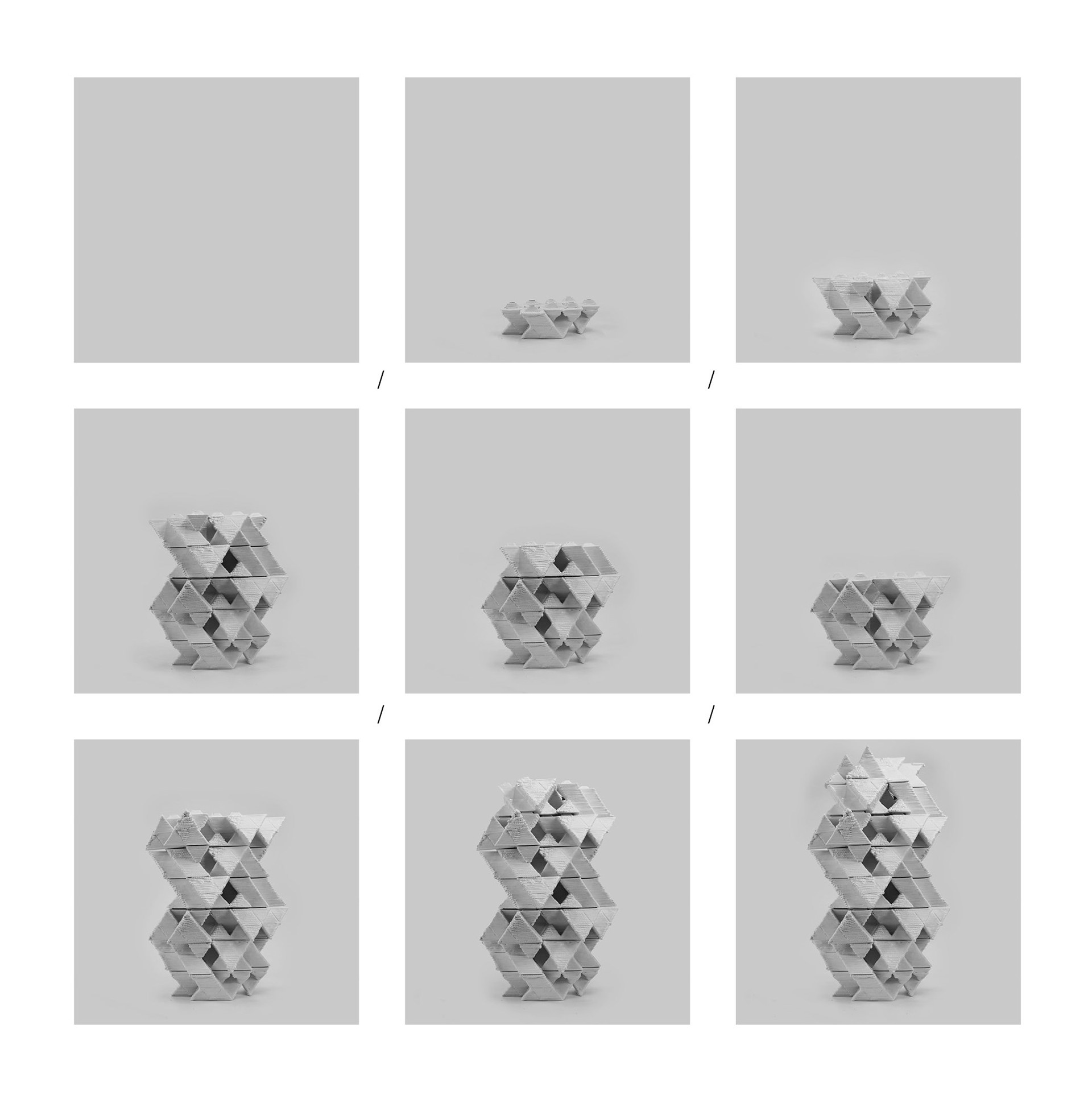
8 Pieces Assembly Process

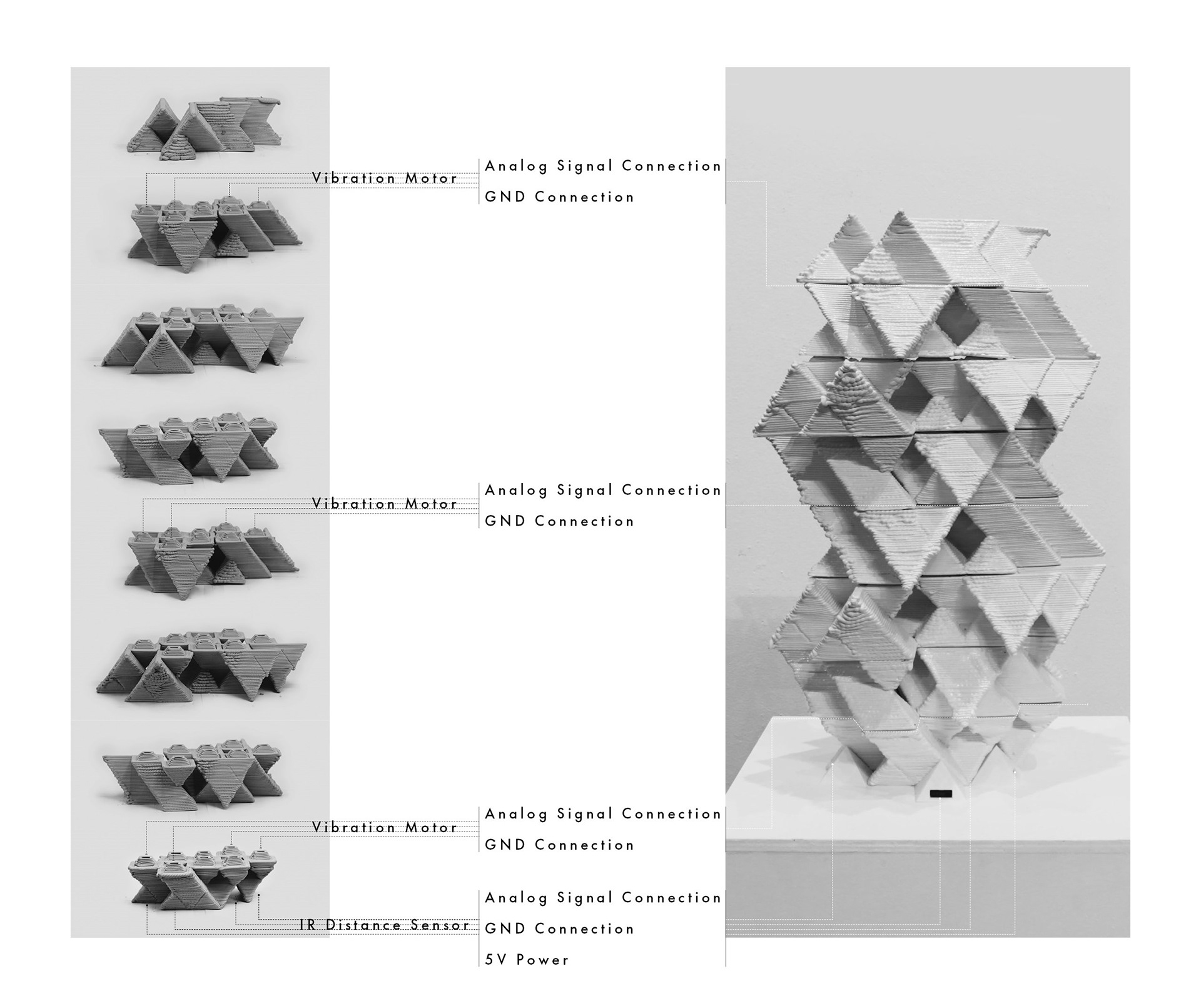
IF Distance Sensor + Vibration Motor Create Sound




Four infrared distance sensors are set up around the clay model. Depending on the distance between the person and the clay model, the vibration motor inside the clay model can produce vibrations with different combinations of frequencies. The bisque fire clay model can produce a crisp crash sound.


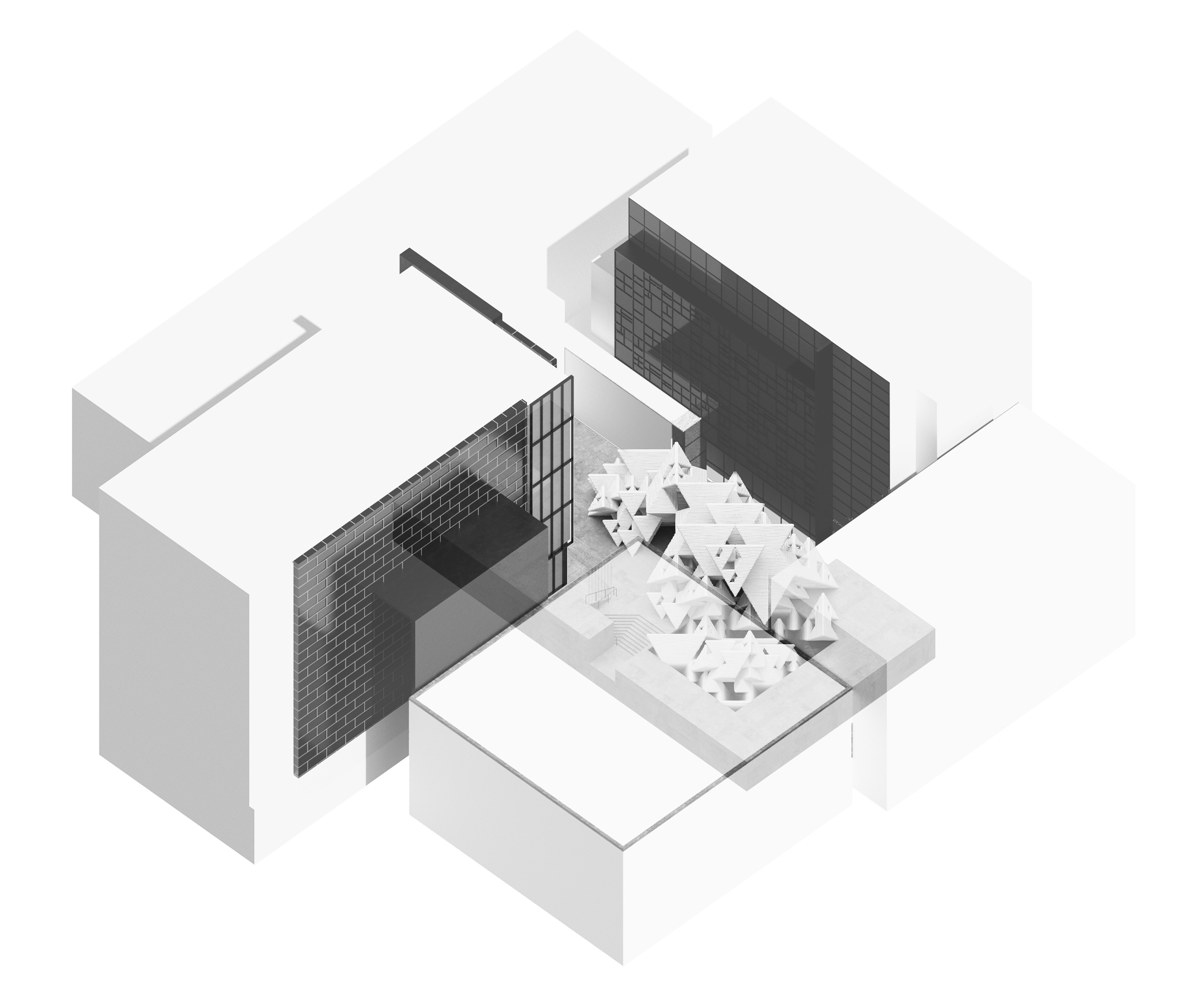
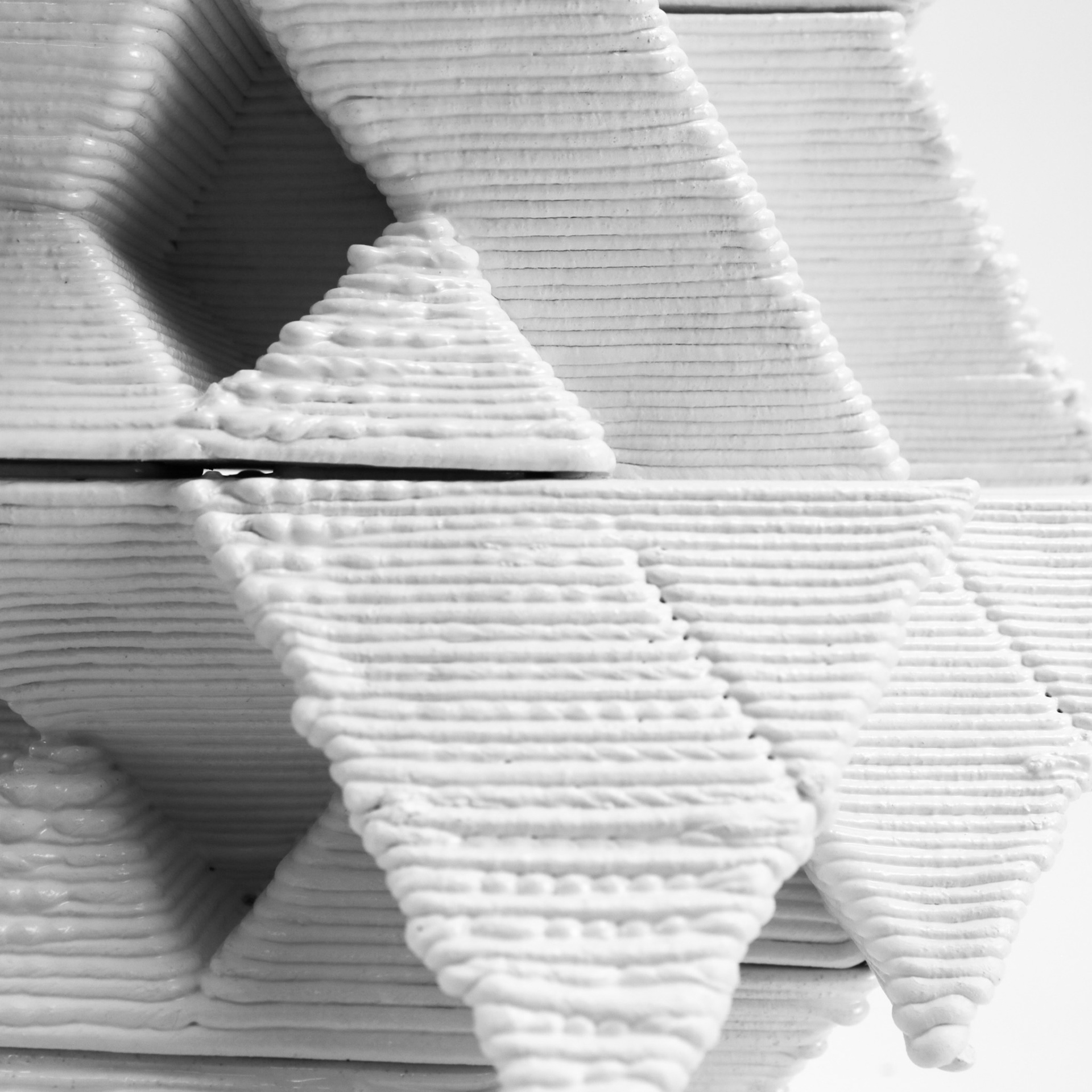
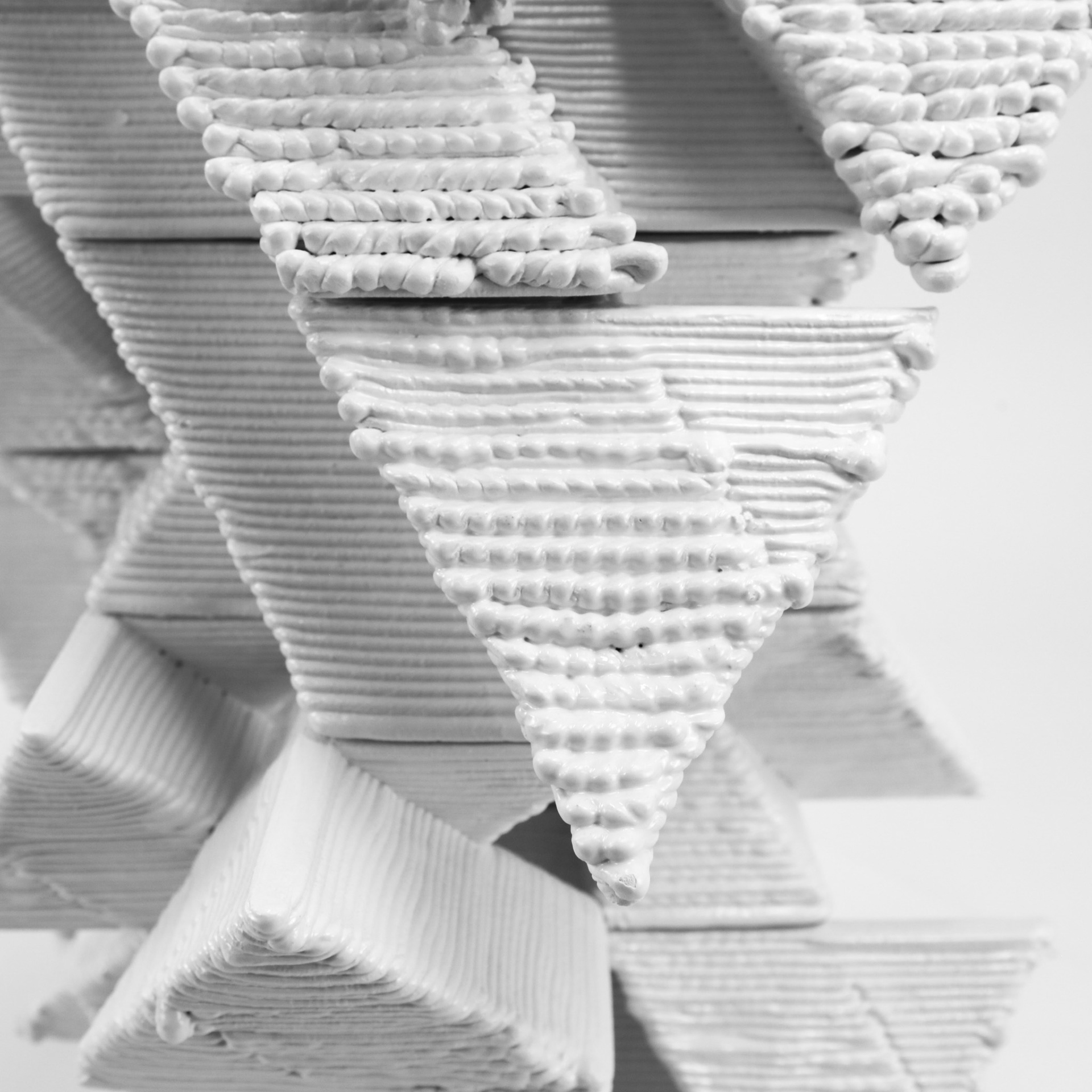
In the process of layering the prototype, several interesting shapes were generated to reorganize the design of the courtyard space through the functionality of the space as well as the relational conditions of the environment. Then by subdivision, the large tetrahedra were split into several small tetrahedra and octahedra, thus making the SOLID space more spatial.

















From Left to Right: Ecem Karaduman, Zai Shi, Toto Tan